Black Panther – Wakanda Forever: Iron Heart Mk. I
November 11, 2022
Guardians of the Galaxy – Vol. 3: Nebula
May 5, 2023
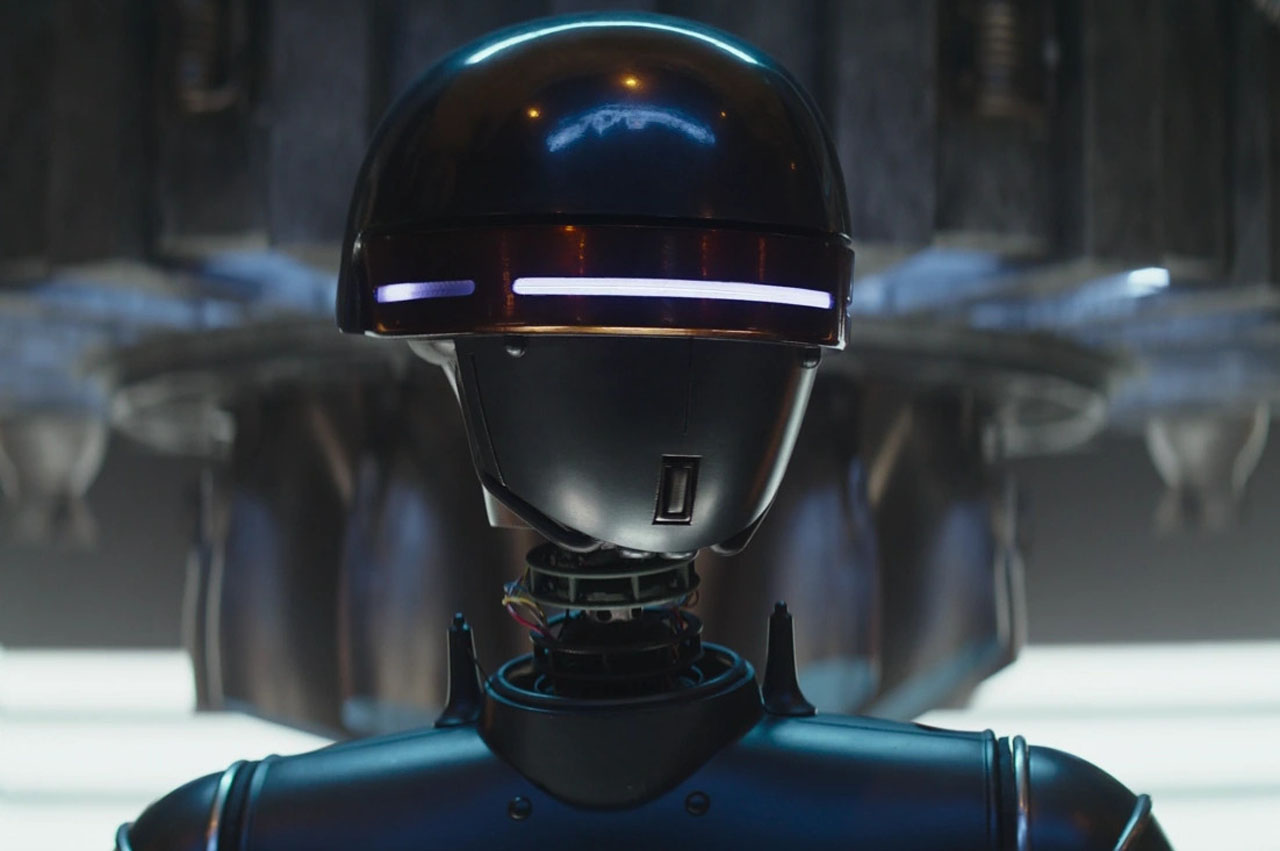
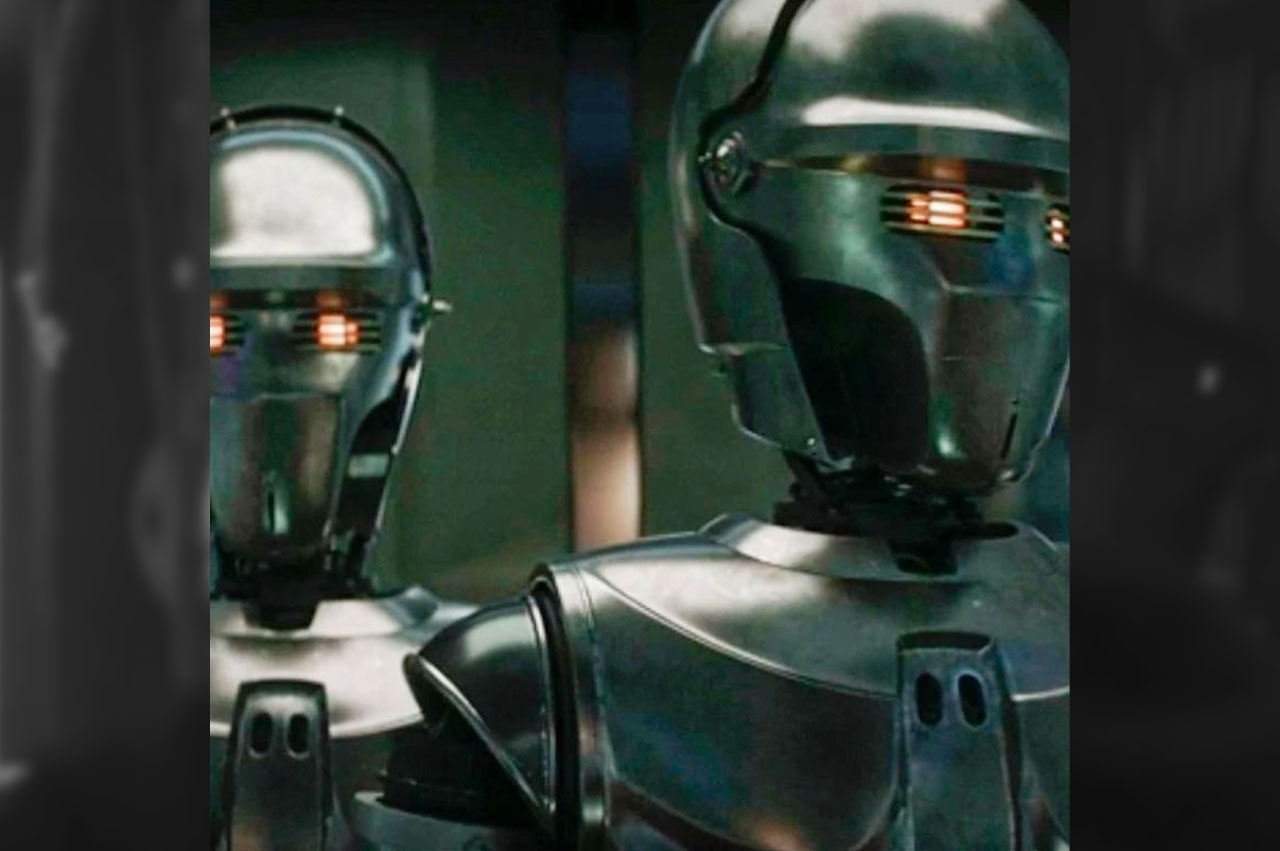
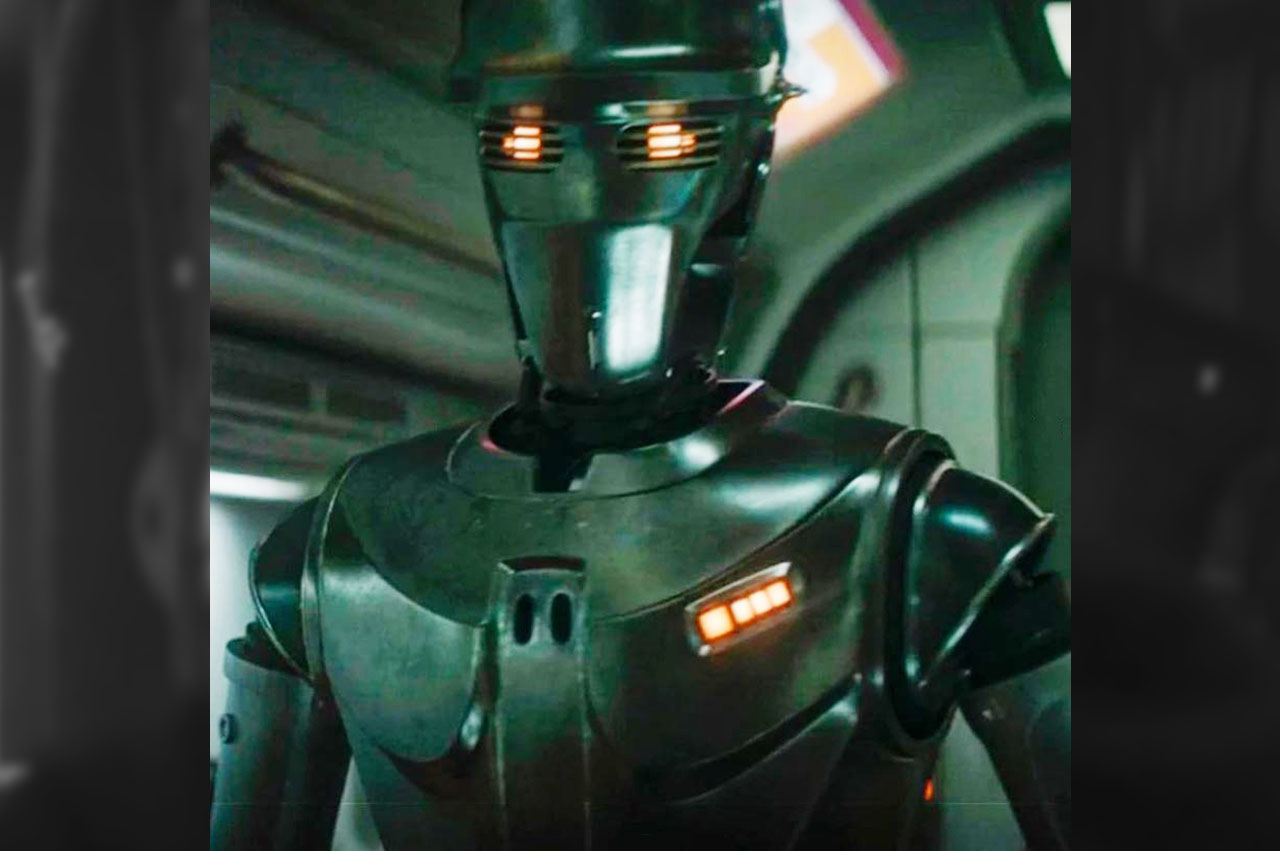
The Mandalorian - Season 3
Plazir Droids
I modeled these droids with puppeteering in mind. The heads were controlled via remote, while the torso, arms, and legs were puppeteered with rods. Some simple rigging in Blender allowed me to make sure that all the clearances were correct, since it allowed me to test to see which movements would make parts crash into each other.
Both droids were modeled using Blender and ZBrush.